




Brushless motors
Brushless DC motors are increasingly becoming popular and rapidly taking over the roles that were previously played by brushed motors. This can be attributed to the brushless motor’s mode of commutation. Unlike its brushed counterpart, the brushless motor is electronically commutated. This makes brushless motors very efficient. It also makes them more durable owing to the fact it does not have brushes that wear out over time leading to poor contact and arching. The efficiency of the brushless motor enables it to be made smaller, lighter and quieter for any given input. This has consequently increased their popularity in HVAC, automotive among other sectors.
Brushless motors too have their downside. Electronic commutation requires controlling circuits that will ensure precise timing of the coil energization which is critical for accurate speed and torque control. Precise timing also ensures that the motor runs at peak efficiency. Fortunately, there is now a wide variety of Brushless motor driver power MOSFET chips that have external or embedded microcontrollers. They not only simplify the design process but also lower component costs.
The basics of brushless motors
Like every other motor, the brushless motor relies on the same method of converting electrical energy into mechanical energy. When current is passed through a winding it generates a magnetic field which then interacts with a second magnetic field, in this case, a permanent magnet. This interaction generates a force on the winding which reaches a maximum when its conductors are at a right angle to the permanent magnet. The higher the number of coils the higher the motor’s output and the smoother the power delivery.
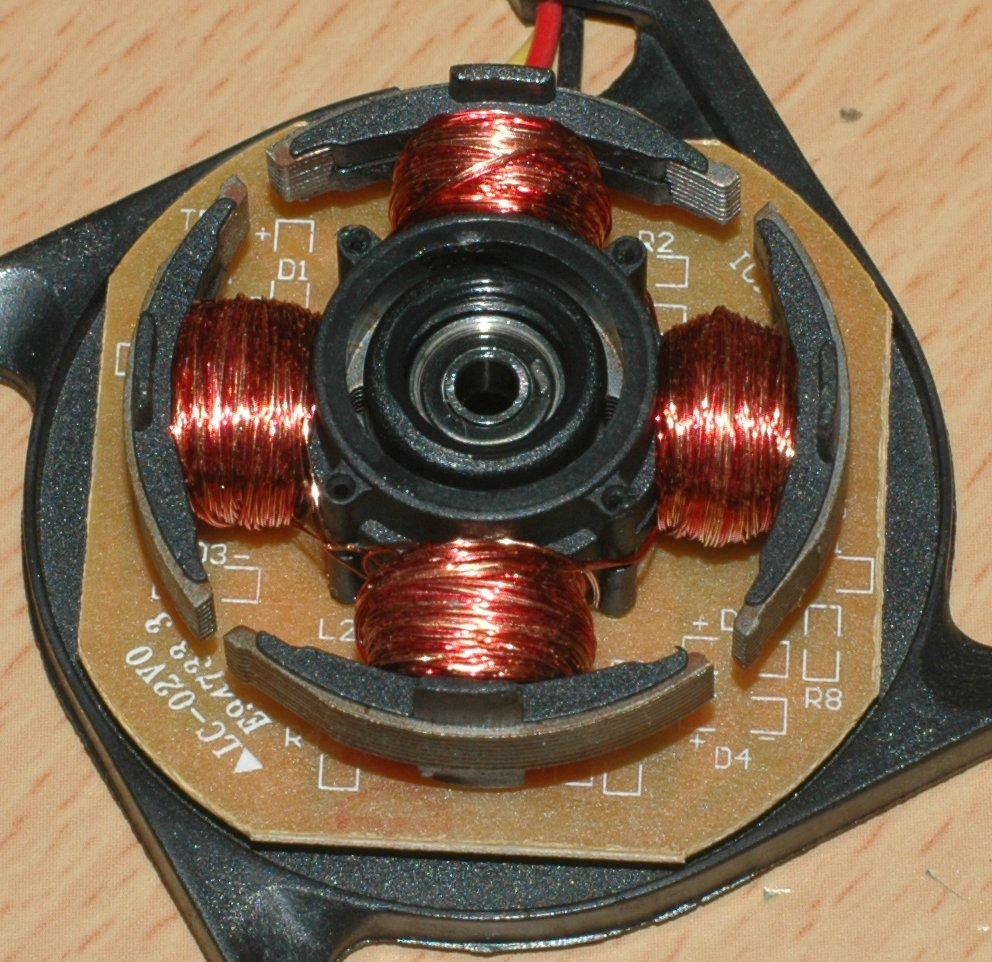
Brushless motor reverses the motor setup to overcome mechanical commutation. The windings make up the stator while the permanent magnet makes up the rotor. Besides the windings, the stator is also composed of steel laminations that are slotted axially in order to accommodate an even number of windings along the inner circumference. The rotor is made up of the shaft and a hub that has permanent magnets arranged to form not more than eight pairs of to alternate between the ‘N’ and ‘S’.
The windings are stationary and need to be energized in sequence in order to produce a rotating magnetic field to move the permanent magnet. The rotor will revolve at the same frequency as that of the magnetic field created by the stator, it for this reason that brushless motors are known as synchronous type motors.
Powering brushless motors
Three-phase brushless dc motors are commonly powered by applying current through three pairs of power MOSFETs that have been arranged in a bridge structure with each governing the switching of one phase. High-side MOSFETs are controlled by the use of pulse-width modulation that converts DC into modulated driving voltage. Using PWM enables the start-up current to be limited and offers precise control over speed and torque. PWM frequency also forms the trade-off between the switching losses that normally occur at high frequencies.
Controlling brushless motors
Brushless motors can be controlled using three common control schemes;
-
Trapezoidal
This is the simplest and the most common technique. At every step, two windings are energized while the other floats. The problem with this technique is that commutation causes the torque to ripple mostly at low speeds.
-
Sinusoidal
This technique reduces torque ripple. At every step, all the three coils remain energized while the driving current varies in a sinusoidal manner at 120° from each other. This results in smoother power delivery compared to the trapezoidal technique.
-
Field-oriented control
This technique relies on measuring and adjusting the current to ensure that the angle between the rotor and the stator flux is always a right angle. It is more efficient than the sinusoidal technique at high speeds and offers better performance during dynamic load changes compared to the rest of the techniques. Field-oriented control has no torque ripple, is smoother and offers accurate motor control at both low and high speeds.
-
Position sensing
Position sensing is very important in brushless motors. In trapezoidal control technique, for instance, MOSFET bridge switching has to occur in a precisely defined sequence for the motor to operate efficiently. The switching is determined by the relative position of the rotor’s permanent magnets. The position is sensed using two methods;
-
The hall-effect sensor
The sensor is combined with a switch that generates a “high” or “low” signal. These logic signals from the hall-effect sensors are used to determine the commutation sequence. At any given moment, one or more of the sensors are triggered by one of the rotor’s magnetic poles.
EMF sensing
Brushless motors which do not have hall effect sensors utilize back EMF to give rise to a current in the windings of the motor to generate a magnetic field that opposes the original change magnetic flux. The EMF tends to resist the rotation of the motor hence is referred to as back EMF. The EMF generated is proportional to the angular velocity for every motor of fixed magnetic flux and windings.
By monitoring back EMF, the relative positions of the rotor and stator can be determined using a programmed microcontroller. This method of sensing position reduces the number of wiring and connections and improves reliability. The motor position cannot be determined at startup owing to the fact that no back EMF is generated when the motor is stationary hence the motor us started on open loop configuration until sufficient EMF is generated to enable the controller to determine the rotor and stator position
Irrespective of the type of the controlling technique, brushless DC motors are more preferred to their brushed counterparts. If not for their efficiency, it is for their durability. With the cost of motor drivers decreasing by the day, the cost of brushless motors expected to also decrease. Get yourself one today and share in the marvel of brushless DC motors.
Related posts:
 HOW SOLAR POWER SYSTEMS PRODUCE ENERGY
HOW SOLAR POWER SYSTEMS PRODUCE ENERGY
 Fast Track to Bluetooth 5 Mesh Networking
Fast Track to Bluetooth 5 Mesh Networking
 Blockchain: Understanding Its Uses and Implications
Blockchain: Understanding Its Uses and Implications
 LED Power Supply: Consider Five Factors Before Selecting
LED Power Supply: Consider Five Factors Before Selecting
 INTEGRATED POWER MODULES: MEANING, TYPES, AND BENEFITS
INTEGRATED POWER MODULES: MEANING, TYPES, AND BENEFITS
 LED Lighting for Commercial Applications
LED Lighting for Commercial Applications
 Wireless Sensor Networking Products
Wireless Sensor Networking Products
 Different Types of Sensors with their Applications
Different Types of Sensors with their Applications
 XMC1202 LED Lighting Shield for Arduino
XMC1202 LED Lighting Shield for Arduino
 Electric Motor: Understanding Types and their Uses
Electric Motor: Understanding Types and their Uses
 Comparing Low-Power Wireless Technologies
Comparing Low-Power Wireless Technologies
 ITT Cannon Trident Cost-Effective Connectors
ITT Cannon Trident Cost-Effective Connectors




1 Comment